Characterization of a Novel 3D Surface Motion Tracking Device with Ambient Light and Camera Blockage Robustness
Characterization of a Novel 3D Surface Motion Tracking Device with Ambient Light and Camera Blockage Robustness
“The use of a blue projection pattern has shown less sensitivity to ambient lighting and surface color conditions. The use of parallel multi-camera calibrations has shown good robustness against camera blockage.”
Authors
Rodney D. Wiersma, University of Pennsylvania
Daniel Kayser, Thomas Speck, LAP GmbH Laser Applikationen
AAPM2023 65th Annual Meeting and Exhibition
Abstract
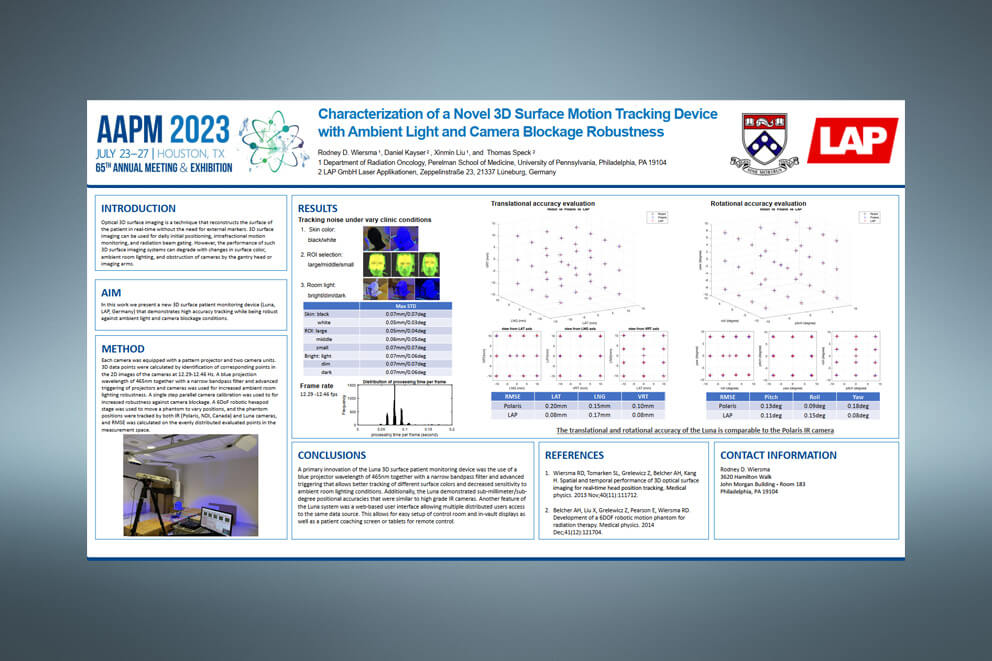
Purpose: Optical 3D surface imaging is a technique that reconstructs the surface of the patient in real-time without the need for external markers. 3D surface imaging can be used for daily initial positioning, intrafractional motion monitoring, and radiation beam gating. However, the performance of such 3D surface imaging systems can degrade with changes in surface color, ambient room lighting, and obstruction of cameras by the gantry head or imaging arms. In this work we present a new 3D surface patient monitoring device that demonstrates high accuracy tracking while being robust against ambient light and camera blockage conditions.
Methods:
Each camera was equipped with a pattern projector and two camera units. 3D data points were calculated by identification of corresponding points in the 2D images of the cameras at 12.5Hz. A blue projection wavelength of 465nm together with a narrow bandpass filter and advanced triggering of projectors and cameras was used for increased ambient room lighting robustness. A single step parallel camera calibration was used to for increased robustness against camera blockage. A robotic stage was used to move a phantom to well-known positions.
Results:
Tracking a rigid phantom with a clinically relevant region-of-interest (ROI) over many different positions at normal room lighting conditions resulted in a positional RMSE accuracy of 0.1mm VRT, 0.2mm LNG, and 0.3mm LAT. Blockage of camera pods resulted in similar RMSE of 0.1mm VRT, 0.1mm LNG, and 0.1mm LAT. Changing ambient lighting to OFF resulted in an RMSE of 0.1mm VRT, 0.1mm LNG, and 0.1mm LAT. Additional comprehensive testing involving angular rotations and human volunteers is ongoing.
Conclusion:
The use of a blue projection pattern has shown less sensitivity to ambient lighting and surface color conditions. The use of parallel multi-camera calibrations has shown good robustness against camera blockage.